La robótica persigue desde hace décadas la misma obsesión: reducir el tamaño de las máquinas sin vaciarlas de inteligencia. Hasta ahora, esa portería tenía un límite físico difícil de traspasar. Por encima de cierto umbral, fabricar un robot más pequeño implicaba hacer varios compromisos. Eso acaba de cambiar. Un equipo de investigadores ha demostrado que Es posible construir un robot autónomo tan pequeño que apenas pueda verse, pero aún así capaz de percibir su entorno, procesar información y responder sin intervención externa.
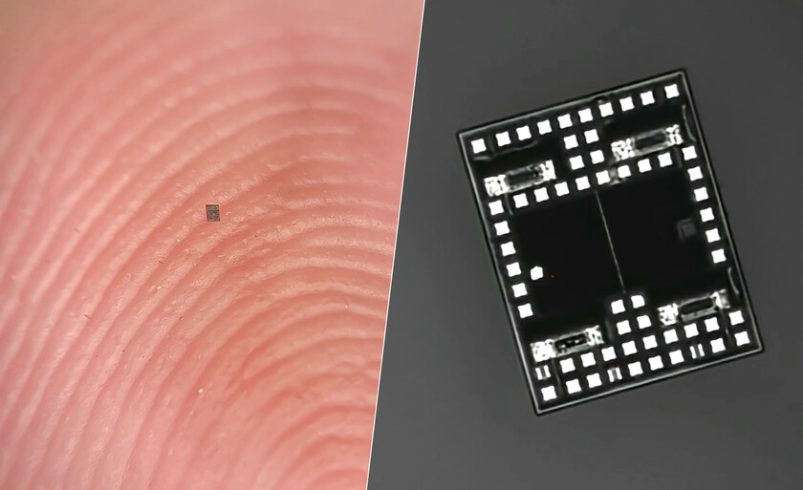
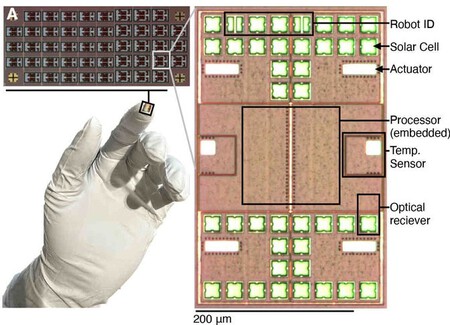
El desarrollo proviene de investigadores de la Universidad de Pensilvania y la Universidad de Michigan, quienes han construido lo que el equipo describe como el robot autónomo programable el más pequeño logrado hasta el momento. El dispositivo está diseñado para funcionar sumergido en un fluido, y en ese entorno puede moverse y operar. El artículo científico describe un cuerpo que mide aproximadamente 210 por 340 micrómetros y 50 micrómetros de espesor. Su escala es tan pequeña que puede descansar sobre la cresta de una huella digital y es casi invisible a simple vista.
Un robot completo a escala microscópica. La diferencia respecto a intentos anteriores no está sólo en la miniaturización, sino en lo que teóricamente este dispositivo logra integrar. Según los investigadores, el microrobot incorpora computación, memoria, sensores, sistemas de comunicación y locomoción dentro de una única plataforma autónoma. Hasta ahora, estos sistemas dependían a menudo de equipos externos para procesar información o tomar decisiones. En este caso, el robot puede ejecutar algoritmos definidos digitalmente y modificar su comportamiento en función de lo que sucede a su alrededor.
El principal obstáculo para llegar hasta aquí no ha sido conceptual, sino físico. En escalas micrométricas, las reglas cambian: la gravedad y la inercia pierden peso, y fuerzas como la viscosidad y la resistencia dominan. En ese entorno, moverse a través de un fluido se parece más a moverse a través de un material espeso que a nadar en agua. A esta dificultad se suma una restricción aún más severa: la energía. Con presupuestos de energía de alrededor de 100 nanovatios, integrar la propulsión y la informática al mismo tiempo había sido, hasta ahora, un compromiso casi imposible.
Electrónica diseñada para sobrevivir casi sin energía. La solución implicó repensar la arquitectura electrónica del robot desde cero. El equipo trabajó con un proceso CMOS de 55 nanómetros y utilizó lógica digital por debajo del umbral para mantener el consumo dentro de un presupuesto cercano a los 100 nanovatios. En ese espacio lograron integrar células fotovoltaicas para potencia, sensores de temperatura, circuitos de control de los actuadores, un receptor óptico para programación y comunicación, además de un procesador con memoria.
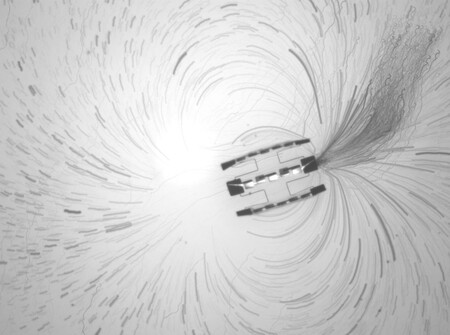
La locomoción es uno de los aspectos más singulares del diseño. En lugar de motores o apéndices, el microrobot utiliza campos eléctricos para inducir corrientes en el fluido que lo rodea, moviéndose sin partes móviles que puedan romperse. Sus creadores lo describen como un sistema en el que el robot genera su propio “río” para avanzar. Esa misma lógica minimalista se extiende a la comunicación. Las mediciones que realizas, como la temperatura, se codifican en secuencias de movimiento, un método sencillo pero eficaz a esta escala.
Pequeños robots que actúan juntos. Más allá del comportamiento individual, el equipo ha demostrado que estos microrobots pueden sincronizarse y operar en grupos. Según los investigadores, varios dispositivos son capaces de coordinar sus movimientos y formar patrones colectivos comparables a los bancos de peces. Este enfoque abre la puerta a tareas distribuidas, en las que cada unidad aporta información o acción local. En teoría, estos grupos podrían seguir funcionando de forma autónoma durante meses si se mantuvieran cargados con luz LED en sus células solares, aunque la memoria disponible limita por ahora la complejidad de los comportamientos programables.
Con esta plataforma, los investigadores proponen un camino hacia microrobots de uso más general, capaces de ejecutar tareas en entornos difíciles sin una supervisión constante. En el horizonte se vislumbran aplicaciones que hoy están más cerca del laboratorio que del mundo real, por ejemplo en biomedicina, donde dispositivos de este tipo podrían funcionar con fluidos corporales. El propio equipo insiste en que se trata sólo de un primer paso. El avance abre una base técnica, pero el salto a usos prácticos dependerá de aumentar el rendimiento.
Imágenes | Universidad de Pensilvania y Universidad de Michigan
En | Aún no sabemos si los robots humanoides serán la próxima gran revolución tecnológica. Sí, sabemos que China lo liderará.





{kind=link}